RapidRobot
下一代机器人控制器就在这里。RapidRobot 是一款强大的机器人控制器,可为用户提供直观的界面,用于实时编程、仿真和操作机器人。

概述
一款可以发挥作用的机器人控制器
可以加载到机器人控制器中的脚本,用于为任何自定义创建客户用户块
使用单个控制器为您的机器使用 RMP 运动控制器,为其他机器人使用 RapidRobot。
除了机器人之外,用户还可以添加其他兼容 EtherCAT 的从属设备。(伺服、步进或 IO)
执行与使用 Teach Pendant 相同的关节空间和笛卡尔空间慢跑和示教操作
RapidRobot 软件可以与任何兼容 EtherCAT 的协作机器人、工业机器人、delta 或 SCARA 机器人一起使用
您可以使用 RapidRobot 软件同时控制多达 11 个机器人
使用我们的时间戳在实时确定性网络中收集或修改机器人动作
可以离线创建和编辑机器人程序
建筑
该插件允许使用我们的开放式 RMP EtherCAT 软运动控制器

RapidArm 组件
推荐的硬件
Surface

尺寸(高 x 宽 x 深): 292 x 201 x 8.5 毫米
屏幕尺寸: 12.3”
分辨率: 2736 x 1824
重量: 784 克
风格: 有线或无线
机器人控制器

操作系统: Windows 10 32/64 位
核心支持: 第 6 代英特尔® 酷睿™ i7/i5/i3 LGA1151 插槽型处理器
芯片组: 英特尔® 100 系列
显示器支持: 1 x DVI-D 和 1x HDMI 用于双独立模式
局域网端口: 3 x 英特尔® GbE 局域网端口;支持 WoL、分组和 PXE
USB 支持: 4 x USB 3.0、2 x USB 2.0 和 2 x RS232/422/485 自动
电源支持: +24VDC 输入和 ATX 电源模式。
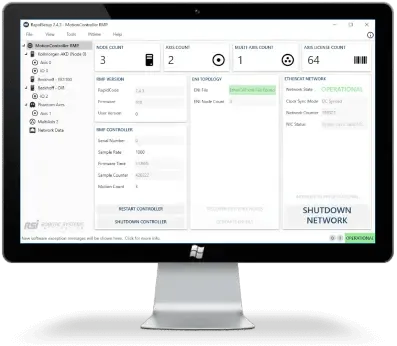
RapidRobot 软件
直观的用户界面
最直观的协作机器人控制器
享受终极机器人程序编辑器。创建程序就像使用移动应用程序一样。它为机器人行业带来了先进的设计界面,初学者和专家都会爱上它。它非常智能,超级灵活,非常强大,而且本质上是可视化的。这就是对机器人进行编程的本意。

移动机器人从未如此简单
使用我们的软件,将您的机器人移动到那里非常容易。你可以完全自由地在关节或笛卡尔空间中慢跑。轻松更改速度、模式和保存积分。通过我们的动画,您将确切地知道机器人的哪个部分正在移动以及何时达到某些极限。控制机器人从未如此简单和有趣!
输入和输出状态和操作
故障排除和配置 IO 全部集中在一处。轻松修改每个组件的状态,或者简单地观察程序如何更改可用 IO 的状态。


适合不同人群的不同口味
在RSI,我们看到不同的流行技术和趋势是如何演变的,我们的目标是及时了解可能使客户生活更轻松的技术。RA 软件允许您更改主题、慢跑风格和语言。这些只是即将推出的更多自定义物品中的第一个!
试试我们的免费试用版!
注册参加 30 天软件评估版。
工程师将很快为您提供帮助。