
SynqNet 运动控制器
基于 PC 的开放、强大、经济实惠的 SynqNet 软运动控制器,适用于 OEM 机器制造商。
主要好处
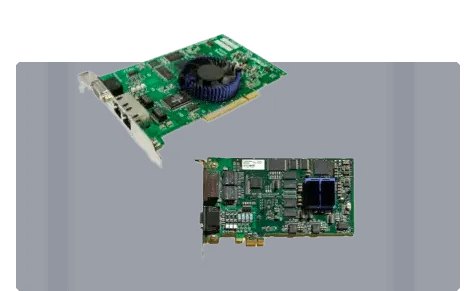
QMP/ZMP(PCIe 或 PCI)
无需实时操作系统,但仍能实现卓越的实时、同步网络性能(高达 48 kHz 伺服更新速率,<100 ns 抖动)
ZMP/QMP 运动控制器卡是我们的独立 IPC 的预安装包
(在不停止计算机的情况下替换故障节点)
控制器固件可使用 MechaWare (MATLAB) 进行自定义,允许实现高级自定义控制算法。
支持多达 64 个节点和 64 个轴。
采用 64 位 PowerPC 处理器,频率从 266MHz 到 1.2 GHz
建筑
物理组件的相互关系
- 运动固件在控制器卡上的专用 Power PC 处理器上运行,以实现极高的确定性性能。
- 通过 SynqNet 与网络上的设备通信
- 用户在 Windows 中运行的应用程序软件和诊断工具
- RapidCode API 库在 Windows 应用程序和运动固件之间架起桥梁






软件
强大而直观的工具,用于创建运动应用程序和加快开发
RapidCode API
RapidCode 是一个强大而直观的应用程序编程接口 (API),它允许开发人员使用 C++、C# 或 VB.Net 快速创建机器控制应用程序。该 API 分为几个简单的类别——控制器、轴、多轴和 IO。
快速设置
RapidSetup 是一个易于使用的实用程序,用于配置、归位、调整、指挥运动和故障排除。始终可见的树视图显示网络上所有节点的实时状态和拓扑,从而简化了系统的导航和配置。I/O 状态以及运动参数(例如命令位置、实际位置、错误和故障)清晰可见。
MotionScope
MotionScope 绘制并跟踪来自运动控制器上任何地址的输入/输出信号数据。它的外观与示波器类似,是开发和排除运动控制系统故障的特殊工具。
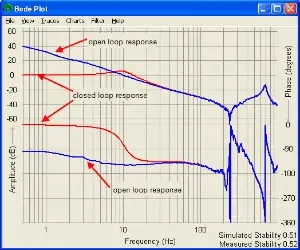
Bode 工具
Bode Tool 是一款实用程序,可以轻松地从系统获取频域数据。Bode 工具使控制工程师可以轻松获得正确设置和调整控制系统所需的数据。
Mechaware
MechaWare 使软件和机械工程师能够快速、轻松地设计、测试和修改自定义运动控制算法。
MechaWare 利用 MATLAB® /Simulink® 集成机械系统和控制软件设计,从而缩短设计周期和卓越的运动系统性能。
VM3
VM3 实用程序允许您查看和更改 RMP、QMP 或 ZMP 控制器中存储在内存中的数据。VM3 对于定位内存地址以在 MotionScope 中绘制自定义信号特别有用。使用 VM3 更改运动控制器上的数据时,请始终格外小心。
控制器功能
我们的 SynqNet 控制器提供许多运动和 IO 功能
在 API 的定位模式下执行驱动级别自动调整,或者在扭矩模式下使用频率响应调整工具优化机器性能。
代表整个运动曲线的原始数据点流。PT、PVT、PVAJT 动作直播类型可供选择
执行预定义或自定义的归位例程。
从当前命令位置移动到新位置(梯形、移动 S 曲线)
保持点间的恒定速度。一个例子是输送机轴。逐渐提高或降低速度的能力。
配置输入比较以触发输出或其他事件。状态在固件级别上进行监控。当条件为真时,将生成配置的响应。
几何路径运动允许使用简单的几何元素(弧线和直线)指定复杂的二维和三维路径。
从轴的位置在数学上与主轴的位置相关联。创建一张桌子,然后从摄像头开始。
提供了一种收集和缓冲内存中任何数据的机制。随后通过基于中断的事件对数据进行轮询。
有多种控制方案可供选择,包括使用单独的 PID 控制线性和偏航轴的算法。
提供以指定频率中断主机的功能,其中频率是控制器采样率的倍数
可以在不中断其他轴运动的情况下无缝更换机器上的驱动器。
将一个轴的指挥位置配置为偏离另一个轴。
锁定 FPGA 中的位置计数器,由控制器直接读取。基于一个或多个源输入触发器锁定轴位置的能力。
将电缆中断、驱动器或电机故障警告/消息直接添加到软件中
启用辅助反馈
应用程序
控制器应用和行业示例
切割机
- 路径运动 — 通过添加弧线和直线段快速创建形状
- 电子传动装置可同步龙门架上的两个轴
- 频率响应调整工具可优化系统带宽和稳定性
- RapidBode 跟踪不同大小计算机上随时间推移的带宽和稳定性
- 高速数字 I/O 触发和捕获
- 智能机器状态/诊断
- 皮革、织物、碳纤维、塑料、橡胶等
航空航天与国防
- 能够创建定制的双电机控制算法,通过消除间隙来帮助提高精度、可重复性、性能和稳定性
- 使用我们的 RapidCode for InTime(在 InTime 实时操作系统上运行的 API),可以显著缩短延迟时间
- 自定义设备驱动程序支持多种操作系统,例如 Vxworks、QNX、Linux 等
- 即时修改运动轨迹
- 用于优化系统带宽的频率响应调整工具
太阳能
- 轴数高
- 同步的多轴流式传送运动
- 高速数字 I/O 触发和捕获
- 高性能精确运动
- 使用强大的 RapidCode 编程 API 在 C/C++/C#/VB.NET 中进行运动编程
- 频率响应调整工具可优化系统带宽和稳定性
半导体
- 同步的多轴流式传送运动
- 高速数字 I/O 触发和捕获
- 高性能精确运动
- 辅助反馈可轻松添加到控制回路中
- 轴数高
- 频率响应调整工具可优化系统带宽和稳定性
医疗
- 同步的多轴流式传送运动
- 能够在固件中嵌入运动学
- 双安全控制器和伺服驱动器
- 原生扭矩模式对施加力很有用
- 配置输入比较以触发输出或其他事件,在固件级别进行监控
- 频率响应调整工具可优化系统带宽和稳定性
三角洲机器人
- 能够在固件中嵌入运动学
- 同步的多轴流式传送运动
- 高速数字 I/O 触发和捕获
- 使用强大的 RapidCode 编程 API 在 C/C++/C#/VB.NET 中进行运动编程
伺服压力机
- 称重传感器/力传感器反馈到伺服回路
- 能够在位置和力控制模式之间切换
- 实时数据记录内置于运动固件中
- 经济的控制解决方案
包装
- 高速数字 I/O 触发和捕获
- 配置输入比较以触发输出或其他事件,在固件级别进行监控
- 通过定义一个名为 Camming 的关系表,在数学上将从轴的位置与主轴的位置联系起来
- 能够以指定频率中断主机,其中频率是控制器采样率的倍数