

导言
对于需要精确移动和控制物体的工业自动化公司来说,运动控制器是至关重要的。过去,公司必须依赖过时、学习和编程复杂、依赖硬件且昂贵的运动控制器。值得庆幸的是,时代变了。
随着 EtherCAT 和软件运动控制器的问世,工业公司现在有了更实惠、更具扩展性的运动控制选项。让我们仔细看看。
什么是 EtherCAT?
EtherCAT 是一种基于以太网的 “开放” 协议现场总线网络,可使用专用的硬件和软件持续高效地实现实时过程数据传输,从而确保最佳的机器性能,并用于解决要求苛刻的运动控制应用。

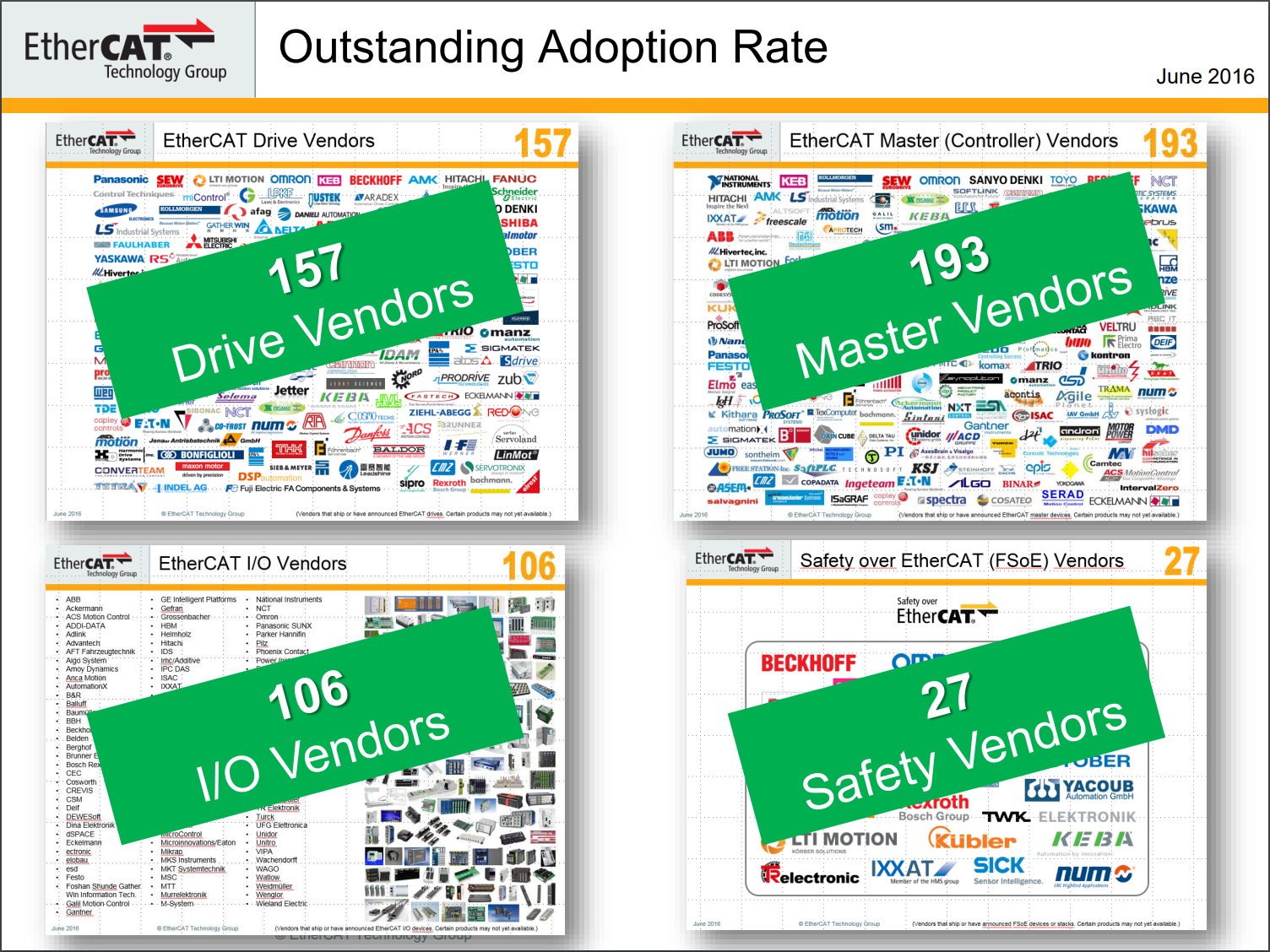
EtherCAT 最令人印象深刻的功能之一是其开放协议。EtherCAT 技术由 EtherCAT 技术组 (ETG) 规定。ETG 由控制供应商、OEM 和机器制造商组成,以确保不同供应商之间的协议互操作性。“开放” 理念确保用户可以自由选择自己的首选供应商,而不必承担与一家供应商捆绑在一起的风险。ETG 还为用户提供配置工具、文档和指南。[1]
事实证明,EtherCAT 凭借其确定性性能、灵活的拓扑结构和多种功能可以优化机器性能。[1] 它可以在 30 微秒内处理 1,000 个 I/O 点,在 100 微秒内与 100 个伺服轴通信。[2]
EtherCAT 由行业领导者 Beckhoff Automation 于 2003 年开发,自 2007 年起成为国际标准,使其成为工业自动化应用值得信赖的解决方案。
什么是 EtherCAT 软运动控制器?
在工业自动化方面,基于EtherCAT的软件运动/主控制器占据了主导地位。
软运动控制器是一种直接在电脑上运行的软件程序,它使用最新的CPU来计算其运动算法,并通过网卡传输数据进行输入和输出。EtherCAT 软运动控制器使用强大的 EtherCAT 协议,可让您在所有设备之间实现统一的实时连接。无论您使用的是伺服系统、步进电机还是驱动器。
对于 OEM 机器制造商来说,基于 EtherCat 的软运动控制器是一个有吸引力的解决方案。它们非常强大,性能惊人,并允许您利用现代操作系统所提供的所有强大功能。它们之所以用途广泛,是因为它们允许使用最新和最流行的编程语言(如 C#、C++、Python 等)来构建运动应用程序。这使机器制造商能够创建快速且易于编程的应用程序,这些应用程序可以利用机器学习、物联网、计算机视觉等开源库。
为什么 RMP 是您的 EtherCAT 运动控制器的绝佳选择?
RSI 其使命是在该领域进行创新,使创建受控自动化解决方案变得比以往任何时候都更容易。RSI 是您的完美选择,因为我们投资了多年,开发了一款易于编程且使用最新技术的 EtherCAT 主/运动控制器。
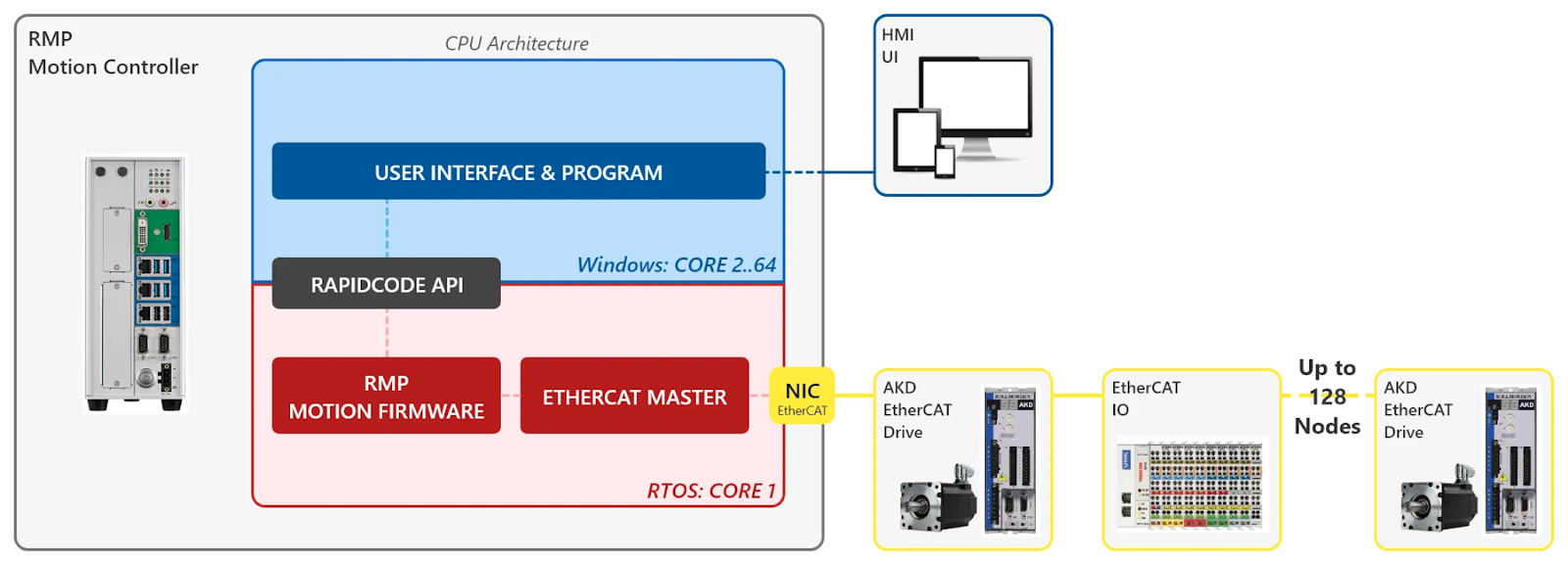
我们的 RMP EtherCAT 软运动控制器(EtherCAT Master)是一款强大而经济的解决方案,RMP 专为增强协调轴和 IO 性能而构建,具有许多优点,包括:
- 确定性表现
- 灵活的拓扑
- 与操作系统无关
- 多种编程语言(C#、C++、Python 等)
- 5 种可用的 API,用于实时轴、机器人或 CNC 运动控制。
- 多达 128 个协调轴、12,000 个数字和 1,000 个模拟 I/O 点。
- 50 多家集成式 EtherCAT 节点制造商和正在增加(提供自定义集成)
- 多元化的动作和 IO 功能。
了解有关 RMP EtherCAT 软运动控制器。
结论
EtherCAT 运动控制器是一种运动软件程序/进程,它使用 EtherCAT 和数学算法来同步和控制电机/轴/执行器和其他设备的运动。它可以用来创建出色的同步运动解决方案。
RSI 提供了 EtherCAT 软件运动控制器,允许您使用自己喜欢的编程语言创建机器控制应用程序。非常适合 OEM 机器制造商。RSI 还提供定制解决方案,因此,如果您需要特定的解决方案,我们可以为您提供帮助。 联系我们 今天来了解更多!
资源
[1] 使用 EtherCAT 进行运动控制的 5 个优势
[2] 什么是 EtherCAT?
[3] 为什么要使用 EtherCAT? [4] EtherCAT — 由 Beckhoff 打造的自动化骨干 (PDF)