解决方案
客户选择的 RMP EtherCAT 运动控制器 指挥动作并触发基本的 iOS 以尝试控制一些东西 —— 主起重轴,它运行驱动轴,在两侧爬上机架。该过程使芯片的液位始终在吸盘触手可及的范围内。第二轴和第三轴通过向下掉落接触切屑表面,施加真空,然后将切屑抬起并移动到工作台上,将切屑从后部料斗移动到工作台上的落点。
对于运动,客户使用了简单的 点对点运动 (梯形电影)。客户使用以下方式控制 IO IOpoint 等级。
证言
“一旦我明白了RSI RapidCode方案有多巧妙,就很容易做出了决定。拥有一个专用的以太网端口来处理与驱动器的所有通信是确切的选择。RSI 的软件方法造就了一款卓越的产品,因为我刚刚编写了一个接口,并从在后台运行的 RapidCode 库中获取了所有数据。”
好处
图片
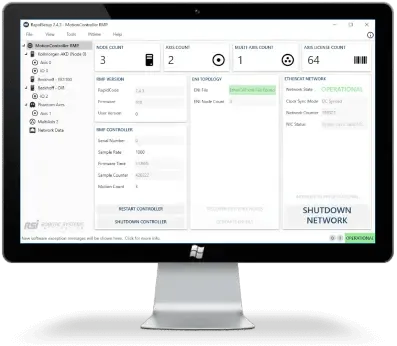
参见下方成品系统的图片:


未找到任何物品。