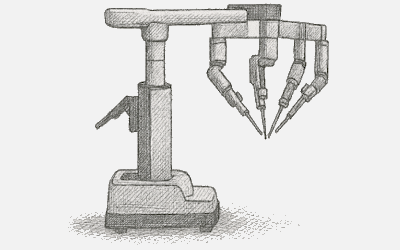
用于治疗心脏病的手术机器人
该客户制造机器人解决方案,以增强心律失常治疗和进行血管内手术。医疗机器人系统利用磁场和机器人精度直接从尖端导航磁导管。病床旁边放置了两块机器人控制的磁铁。客户是各自领域的领导者。

解决方案
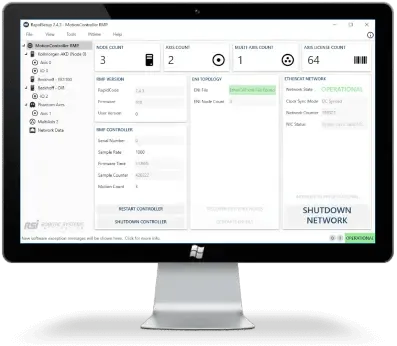
客户使用了 RMP EtherCAT 运动控制器 由于多轴同步。此外,RMP 还帮助客户以实时确定性的方式传输多轴运动轨迹。
软件
客户开发了内部仿真软件,他们能够利用 RSI 的直观性 RapidCode 软件库 (用 C++ 和 C# 编程)以快速投入生产。
硬件
客户选择了紧凑型伺服驱动器与无刷直流电动机一起使用,以确保平稳运动。
运动控制器功能
直播动作: 我们的运动控制器包括几个非常强大的流媒体运动选项,使我们的客户能够以确定性的方式传输协调的多轴运动。
性能和可靠性:当应用程序无法失败时,我们的客户信任我们的高性能运动控制器,因为它提供了医疗机器人所需的可靠性和性能。
实时操作系统集成: 我们的客户正在运行带有 InTime 的运动控制器和 Windows。当延迟时间、性能和可靠性至关重要时,这种架构至关重要。此外,运动固件以实时确定性方式运行。
证言
技术
硬件
- 工业电脑: iPC
- 伺服无刷直流电动机
- EtherCAT 伺服驱动器
- 模块化 EtherCAT IO 节点
软件
- 运动控制器: RMP EtherCAT 运动控制器
- 人机界面/用户界面:由客户定制设计。
- 语言: C++
好处
- 我们的客户可以自由选择最合适的制造商的伺服驱动器和电机。
- 为开发、调试和现场机器提供无限的系统支持。
- 运动解决方案提供性能、可靠性和价格。
图片
未找到任何物品。